Neues Spielzeug: Ich habe mir Anfang 2021 ein Controller namens STM32F405 Feather Express zu gelegt.
Inzwischen habe ich mir ein eigenes CAN FeatherWing gebaut.
So sieht das Teil aus
 Die Adafruit Controllerboards sind im Arduino Universum angesiedelt.
Das heißt man kann sie grundsätzlich auch mit der Arduino IDE und all den verfügbaren Bibliotheken in C/C++ programmieren.
Für mich war (wie schon in der Vergangenheit) wichtig, einen Controller mit CAN Schnittstelle zu haben.
Auch wenn CAN selber nicht in der Arduino Bibliothek abgebildet ist, so gibt es diverse Umsetzungen welche man für den Einstieg nutzen kann.
Die Adafruit Controllerboards sind im Arduino Universum angesiedelt.
Das heißt man kann sie grundsätzlich auch mit der Arduino IDE und all den verfügbaren Bibliotheken in C/C++ programmieren.
Für mich war (wie schon in der Vergangenheit) wichtig, einen Controller mit CAN Schnittstelle zu haben.
Auch wenn CAN selber nicht in der Arduino Bibliothek abgebildet ist, so gibt es diverse Umsetzungen welche man für den Einstieg nutzen kann.
Sensoren
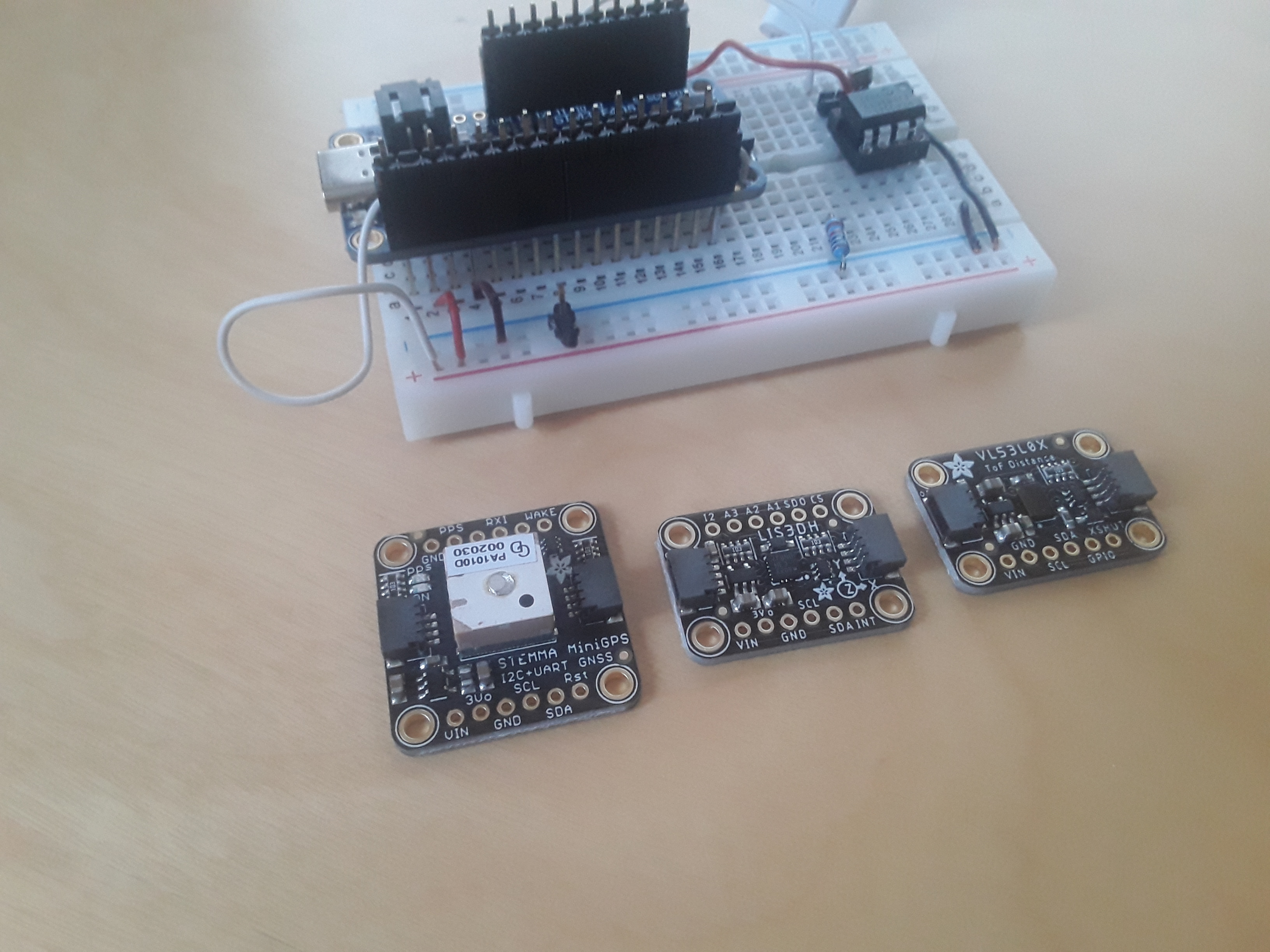 Es gibt jede Menge kleine Sensor-Boards mit einer I2C Verkettung.
Es gibt jede Menge kleine Sensor-Boards mit einer I2C Verkettung.
FeatherWings
... so werden die Addon-Boards genannt, welche unmittelbar aufgesteckt werden können.
- [#2927] StepperWing (I2C)
- [#3315] 2.4" TouchScreen (SPI)
- [#3321] 0.96" Display (SPI) Joystick (I2C)
- [#2809] LIS3DH Triple-Axis Accelerometer & 3xADC (I2C/SPI)
- [#3317] VL53L0X Time of Flight Distance Sensor (I2C)
- [#4407] MLX90640 IR Thermal Camera 55Deg (I2C)
- [#4415] PA1010D Mini GPS (I2C/UART)
Entwicklungsumgebung (IDE)
von der Ardunio IDE zur STM32CubeIDE
Was wird daraus
Anzeige mit CAN Schnittstelle.